Our Japanese community is live via @kudasai_japan, driving around with NATIX 🇯🇵
NATIXは日本でも大きな存在で、日本のコミュニティを心から愛しています!
Check it out 👇
Three weeks ago, one of our leads (a large OEM) asked if we could deliver the amount of data that is worth millions.
Today, another conversation turned into “how much data do you have total? we want it all.” 😄
Demand for real-world data is accelerating fast.
2026 is the year
Here is our December Progress Update, and the last for 2025:
🚗>267K Drivers
🛣️>235M KMs
🤖>1.3B Data Points
💹>5.8B $NATIX Staked
🔥>516M Tokens Burned
📹>100K Multi-Camera Driving Hours
🥇WorldSeek VLM Release
Full recap👇
https://www.natix.network/blog/progress-update-natix-network-december-2025
2/
We want to thank everyone who made 2025 possible: all the drivers, contributors, DePIN enthusiasts, and supporters. 🚗
2026 is the year of Physical AI. We're ready for it.💪
Elon’s right.
This decade is going to be defined by who owns the long tail.
The hard part is not getting autonomous vehicles to “sort of work.”
It’s grinding through the long tails and edge cases until the system is meaningfully safer than humans. That takes years.
Reasoning
Ever tried finding heavy traffic without getting stuck in it? 😅
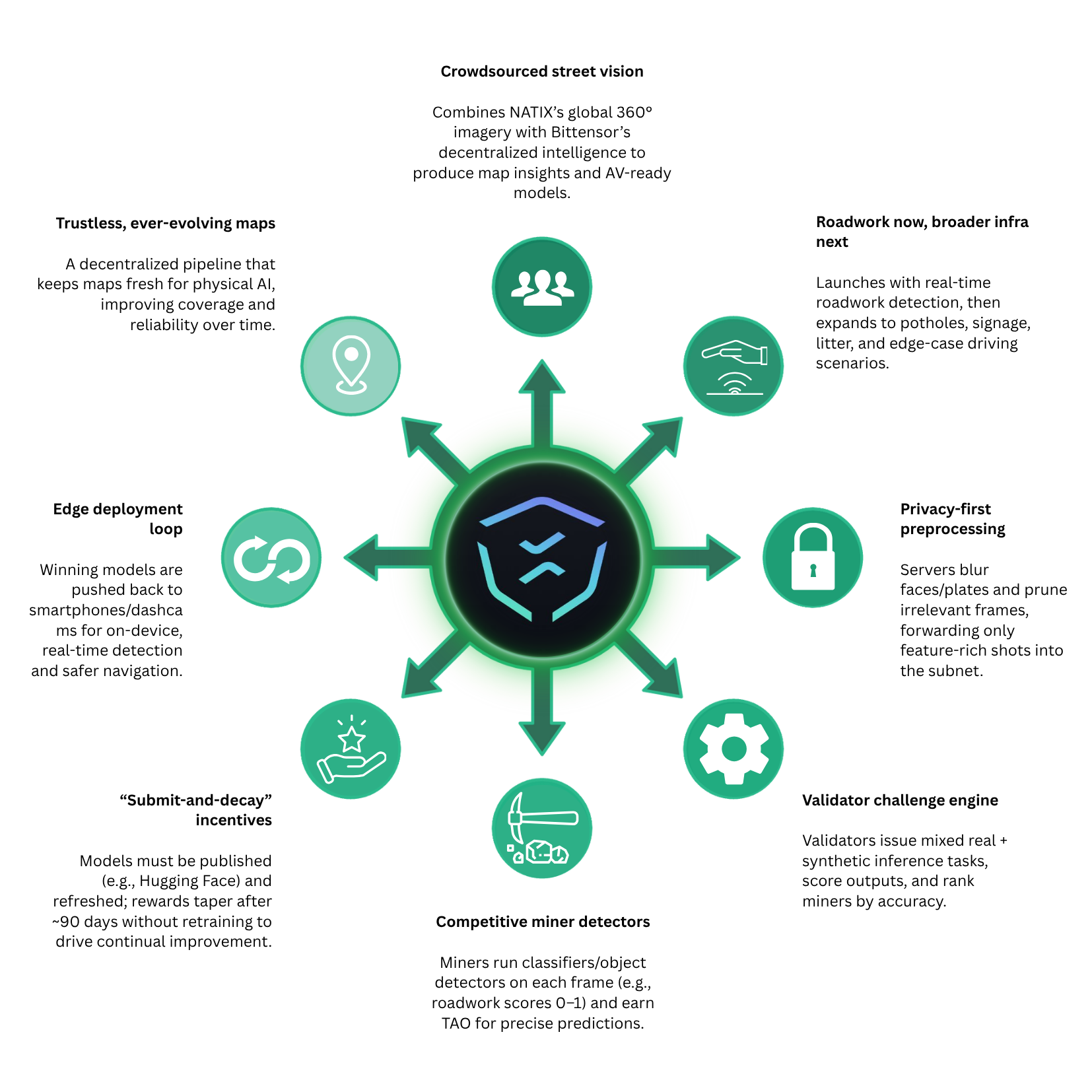
With WorldSeek, you can. 🌎
Just type what you’re looking for, and the Visual Language Model pulls it straight from real-world footage — fast, accurate, and effortless. 🔍
We want to wish a happy New Year to the entire NATIX community. 🎉
Before we kick off 2026, we want to recap what this year meant to us with a few words from CEO @AlirezaGhods2.
This year was crazy, so let's take a look at some of the highlights. 👇
6/
🤖 The Rise of DePAI and Robotics
2025 made it clear. Physical AI is no longer theoretical.
Robotics and autonomy are accelerating, and data is the bottleneck. DePAI is how the world scales it.
NATIX is positioned at the center of this shift. 💪
7/
⚡️2026 is set up to be even bigger
More data. More regions. More products. More partners.
More ways for the community to contribute, earn, and push Physical AI forward. 🌎
We're not going to take our foot off the gas for DePIN, robotics, & autonomous driving. Bring it on.



